Как работает гироскоп и что общего у йо-йо и самолета. Гироскоп для мотоцикла
Гирокары - Мастерок.жж.рф

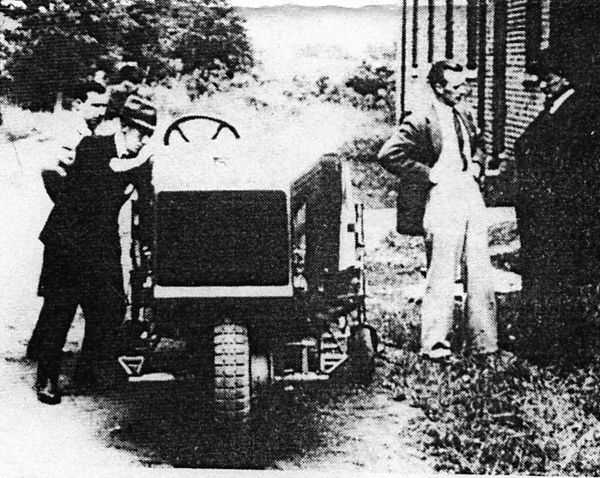
Гирокар на тестовых прогонах. Граф Шиловский справа от водителя. Гироскоп стоит за дверью в середине автомобиля.
Давайте продолжим или вернее будет сказать узнаем предысторию поста про изобреталея Петра Шиловского, которого мы уже изучали в рамках этого блога вот тут Гироскопическая железная дорога. Итак …
В 1912 году русский юрист и губернатор Костромы в отставке Петр Петрович Шиловский приехал в Лондон и показал инженерам Wolseley Tool & Motorcar Company чертежи своего странного экипажа. Странность его состояла в том, что у четырехместной машины, оснащенной двигателем внутреннего сгорания, было всего два колеса — вдоль продольной оси машины. Это, тем не менее, совсем не мешало ей двигаться на самом малом ходу и даже просто стоять на месте без всяких подпорок.
Чем же это достигалось ?
Секрет аппарата Шиловского, как догадался уже проницательный читатель, был прост: машина удерживалась в состоянии равновесия благодаря гироскопическому эффекту тяжёлого маховика.
Шестисоткилограммовый маховик представлял собою диск диаметром в один метр и толщиной почти 12 сантиметров. Для его раскрутки использовался подсоединённый напрямую 110-вольтный электромотор мощностью около 1,25 л.с. и питаемый от динамо-машины, подключённой к главному двигателю автомобиля.
Вкупе с парой 50-килограммовых «маятников» этому примитивному, но весьма внушительному гироскопу не составляло особого труда удерживать в вертикальном положении гирокар, весивший 2750 килограмм.
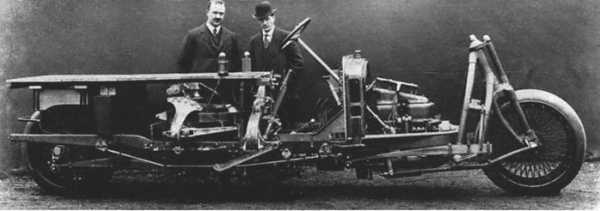
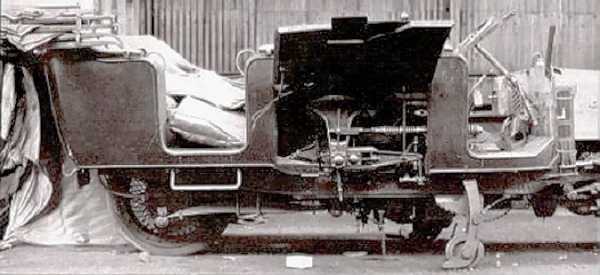
Gyrocar до установки кузова, сфотографировано незадолго до первого испытательного пробега.
Как и несколькими годами ранее Бреннан и Шерль (это немецкий инженер, который тоже строил гиролокомотив), Шиловский в 1911 году представил общественности модель гироскопической железной дороги. Но Россия, как известно, щедрая душа. Если Бреннан после такой демонстрации получил инвестиции на строительство двух полноразмерных машин, Шиловский получил дулю и похвалу от какого-то министерства. Несколько разочаровавшись, он отправился в Англию, где предложил свою концепцию крупному автомобильному заводу Wolseley.
В Англии ещё хорошо помнили Бреннана. Поэтому Wolseley взялся за постройку машины – и построил её в 1912-13 годах. Тут стоит отметить, что в 1913 году Шиловский сам подал в отставку с поста губернатора. Потому что он хотел заниматься наукой, а политика занимала слишком много времени. На родине достижения Шиловского проходили незамеченными. Он разработал гироскопическийкурсоуказатель для самолётов и судов и устройства Шиловского для стабилизации корабельныхорудий. Но все его предложения ортодоксальное министерство флота отвергало. Орудийный стабилизатор Шиловский впоследствии успешно продал британскому военно-морскому ведомству, а «Ортоскоп» всё-таки ставили на тяжёлые самолёты и в России, например, на «Илью Муромца».

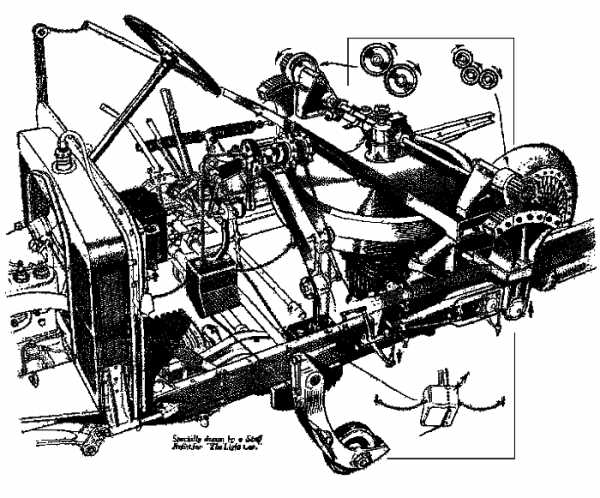
Plan of the Gyrocar. Note the large amount of space taken up by the gyroscope, and the offset driveshaft to the rear wheel. The seats are not visible on this drawing.План Gyrocar. Обратите внимание на большое количество места, занимаемого гироскоп, и смещение приводной на задние колеса. Места не видны на этом рисунке.
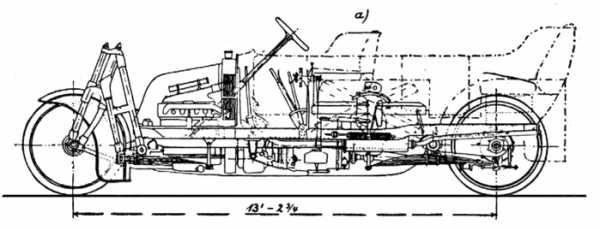
Вверху вид сбоку на Гиромобиль. Гироскоп находится в центре. (рисунок из книги Шиловского). Пунктиром показываются допустимые углы наклона автомобиля.
Граф утверждал, что его автомобиль будет иметь большое военное значение, он сможет пересекать местности, которые непроходимы для 4-колесных транспортных средств, и будет требовать меньше энергии для достижения той или иной скорости.
В это время автотранспорт были еще в младенческом возрасте, а также применения двигателей внутреннего сгорания для военных перевозок практически не началось. Российская армия была наименее технически передовая в Европе, и начало ее механизации с такой необычной конструкции не звучало как очень хорошая идея…
27 ноября 1913 года Шиловский рискнул провести первый опыт с гирокаром. Машину завели, раскрутили маховик гироскопа и убрали два маленьких колеса, поддерживавших гирокар во время парковки. Тот стоял как вкопанный даже при том, что находившиеся в нем люди пытались раскачивать авто. После того, как водитель несколько раз проехал взад-вперед на очень малой скорости, испытатели осмелели и объехали практически всю территорию завода, а затем выехали на одну из улиц Лондона.
Как и ожидалось, гирокар не обнаружил ни малейшей склонности к опрокидыванию даже при том, что находившиеся в нём люди пытались менялись местами, спускались на землю и вновь поднимались в открытый салон.

Даже несмотря на то, что итогом поездки стала неожиданная авария, работы над машиной продолжили, и уже 28 апреля 1914 года Шиловский решился на публичную демонстрацию своего детища в центре Лондона.
Как написал впоследствии журнал «Аэро- и автомобильная жизнь», «…Особое восхищение прохожих вызывало то обстоятельство, что коляска даже при совершенно тихом ходе не теряла устойчивости, Шиловский нарочно ехал как можно медленнее, чтобы доказать, что устойчивость его автомобиля совсем не зависит от быстроты его движения».
В качестве эксперта был приглашён знаменитый пионер гиротранспорта Луис Бреннан. Он пришёл в восторг от гирокара и честно признался, что никогда не думал о применении гироскопа в дорожном, а не в рельсовом транспорте. Итак, машина была с интересом встречена публикой, запатентована в ряде стран, в т.ч. в России, Англии и Германии, и даже сам Луи Бреннан, впервые применивший гироскоп для постройки торпеды, с восторгом отзывался о своей поездке на гирокаре Шиловского.
Итак, машина была с интересом встречена публикой, запатентована в России, Англии и Германии и даже сам Луи Бреннан, впервые применивший гироскоп для постройки торпеды, с восторгом отзывался о своей поездке на гирокаре Шиловского. К сожалению, на этом удача оставила конструктора.
Война, а затем и революция застали его в России и след его на время потерялся. Как ни странно, изобретатель не погиб на войне и не закончил свой путь в подвалах ЧК. Напротив, был обласкан новой властью и даже получил заказ на создание первого в мире гиропаровоза, который должен был ездить по монорельсовой железной дороге.

Его небольшое конструкторское бюро, в котором, помимо прочих, работали и такие талантливые инженеры, как Н.Е. Жуковский, успешно работало над проектом, а к 1921 году даже началось строительство экспериментальной ветки однорельсового пути.
И снова судьба сказала своё веское слово: разруха, гражданская война и последовавший за нею «красный террор» поставили жирный крест на планах Шиловского и едва не стоили жизни ему самому. В самый последний момент изобретателю удалось покинуть с семьёй негостеприимную родину и вновь вернуться на берега Туманного Альбиона.
А гирокар в какой-то момент был похоронен в земле. Совершенно буквально, чтобы во время войны его не повредило. Его просто закопали.

Разумеется, что там его считали давно умершим и, мягко говоря, не ожидали возвращения автора гиромобиля. Машина, стоившая ему таких усилий, уже давно была списана с баланса как ненужный хлам и лежала погребённой в земле. К чести англичан отметим, что пустить её под пресс рука всё же ни у кого не поднялась.
В 1938 году изрядно потрёпанную машину всё же «эксгумировали», починили и поставили в музей Wolseley Tool & Motorcar Company. Всё это время и до самого конца Второй мировой, Шиловский не уставал пропагандировать гирокары как транспорт будущего.

Граф Шиловский пережил Первую Мировой войну, революцию и гражданскую войну. Он вернулся в Англию, вероятно, в 1922 году. Жил в Дулвиче с женой и тремя дочерьми, и работал на Sperry Gyroscope Company.
На это фотографии (1938) его извлекают из-под земли
В 1948 году было решено провести ревизию экспозицию. Англичане и сегодня не могу объяснить, как они, столь трепетно сохраняющие свою историю, умудрились сделать такую глупость. Уникальный Wolseley Gyrocar был признан не имеющим ценности экспонатом и разрезан на металл. Пережившая войну Англия нуждалась в металле…

Вскоре, после окончания войны Шиловский умер в относительной бедности и полном забвении, а в 1948 году и его «гирокар» был вывезен из музея и отправлен на металлолом.
Гирокары строили и впоследствии. Как минимум трижды. В 1929 году Луис Бреннан, в то время в почёте и уважении работавший над гироскопическими системами устройствами для вертолётов, решил вернуться к своему раннему проекту и построил гирокар, на этот раз не рельсовый. Бреннан демонстрировал машину компаниям Austin, Morris и Rover, но успеха не имел. В 1932 году он погиб (в возрасте 79 лет), попав под машину во время визита в Швейцарию. Гирокар Бреннана:

В 1961 году компания Ford представила шоу кар Ford Gyron. Правда, он не был действующим гирокаром: его просто показывали на автосалонах, как машину будущего. Но на Gyron вполне можно было установить маховик и гироскоп Бреннана или Шиловского – конструкция позволяла.
Через полтора десятка лет, прошедших после смерти Петра Шиловского, упавшее знамя подхватил новый энтузиаст — американец Луис Суинни. Его спортивный гиромобиль, имевший 80-сильный двигатель, развивал скорость свыше 125 миль в час.
Это был благословенный 1962 год. Рок-н-ролл был ещё молод, а Движение только набирало свою силу.
Американцам, ещё не растолстевшим от калорийных биг-маков и пиццы с ветчиной, хотелось молодости, скорости, и чтобы ветер бил в лицо. Естественно, что спрос на скорость не мог остаться неудовлетворённым. Слуги Великого Гироскопа тоже с удовольствием откликнулись на требование рынка.
Инженер Луис Суинни (Louis Swinney), спроектировал экспериментальную модель Gyro-X, рекламировавшийся как «первый гироскопически стабилизируемый автомобиль, который не наклоняется при поворотах».
Конечно же, пресса и рекламные конторы глубоко заблуждались, но простим им эту ошибку: если уж им так хочется во всём считать себя первыми, пусть считают. Мы-то знаем, кто был первым на самом деле.
Gyro-X, построенный на производственных площадях компании Gyro Transport Systems, создавался с дальним прицелом. Эта спортивная машина, рассчитанная на успех, должна была стать родоначальницей целой гаммы гиромобилей, начиная от семейных двухколёсных пикапов и заканчивая (чем чёрт не шутит) монстрами-амфибиями цвета хаки с грозной надписью «U.S. Army» на лобовой броне. И поэтому инженеры компании подошли к её созданию со всей основательностью.
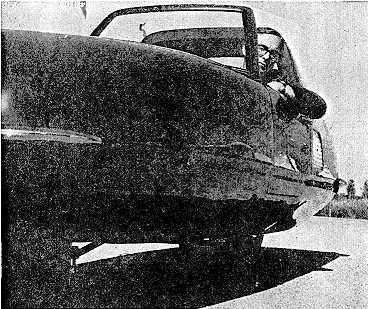
Кабина Gyro-X походила на кабину истребителя с баранкой вместо штурвала.
Машина получилась маленькой (высотой всего 120 и шириной 106 сантиметров), но вёрткой, как мотоцикл, и стремительной, как торпеда: для того, чтобы развить скорость порядка двухсот километров в час, ей было достаточно обычного бензинового двигателя мощностью 80 лошадиных сил.
Отметим, что четырёхколёсному спорт-кару, созданному по обычной для того времени технологии, потребовался бы двигатель, развивающий, как минимум, вчетверо большую мощность.

1961 г., Ford Gyron show car.
Конструкторы попытались таким образом как можно ярче продемонстрировать естественные преимущества гирокара перед обычным автомобилем. Действительно, узкий обтекаемый автомобиль имел аэродинамическое качество в десять раз лучшее, чем у спортивного мотоцикла.
Использование всего двух колёс (тоже, кстати, предельно узких с овальным профилем) позволило самым радикальным образом уменьшить потери энергии, связанные с трением, а встроенный гироскоп избавил водителя от необходимости бороться с креном даже на самых сложных поворотах.
В прессе США, кстати, поднялась невероятная шумиха, спровоцированная появлением этого фантастического концепта. Впрочем, в самом начале второй половины 20 века каких только концепт-каров не появлялось: вспомнить хотя бы Бэтмобиль Lincoln Futura (1954) или целое поколение «газотурбинных» авто General Motors Firebird.Gyro-X – спортивный автомобиль, он должен был стать лишь «первой ласточкой» в серии машин на гироскопах, которую хотело запустить руководство Gyro Transport Systems. Все зависело от того, насколько успешной окажется «первая ласточка». К примеру, совершенно точно известно, что боссы GTS собирались выпускать «семейные» пикапы (на двух колесах, само собой).
Параметры гирокара Суинни были таковы: высота – 1,2 м, ширина – 1,06 м, масса – 843 кг. У автомобиля было два сердца – бензиновый движок на 80 л.с. и гироскоп весом 12 кг, разработанный Томасом Саммерсом-мл. (Thomas O. Summers Jr.).
Т. Саммерс-мл., кстати, к началу 1960-х гг. разработал и запатентовал более полусотни изобретений, как нельзя более тесно связанных с гиродинамикой. Гироскоп в машине россиянина Шиловского весил 600 кг. Почувствуйте разницу, как говорится. Гироскоп в каре Суинни ракручивал полуметровый ротор, маховик, таким образом, мог «выдавать» до 6000 об./мин., чем, собственно, и компенсировался недостаток в массе.
Тот самый гироскоп Саммерса.
Гироскоп и в самом деле был сердцем автомобиля. Разработанный конструктором Томасом Саммерсом младшим (Thomas O. Summers Jr.), который к тому времени уже был владельцем 50 патентов в области гиродинамики, гироскоп весил всего 12 килограммов.
По сравнению с огромным и тяжёлым маховиком, использованным в гирокаре Шиловского, его масса действительно казалась смехотворной. Но здесь недостаток массы уравновешивался огромной скоростью вращения 50-сантиметрового ротора: на полном ходу гидравлическая система раскручивала маховик до шести тысяч оборотов в минуту.
Самое интересное состояло в том, что для своей раскрутки ротор «съедал» ничтожно малую долю мощности двигателя: всего лишь около одного процента.

Демонстрационные поездки гиромобиля производили большое впечатление на зрителей. Ротор раскручивался до положенного количества оборотов. Небольшие вспомогательные колёса эффектно поднимались и, словно в самолёте, закрывались защитными заслонками. Затем гирокар выезжал на гоночный трек и… вы можете представить себе автомобиль, закладывающий крутой левый поворот, но сохраняющий при этом гордое вертикальное положение?
Чтобы ещё больше потрясти воображение почтеннейшей публики, конструкторы подкручивали систему до режима «суперкомпенсации крена» и тогда, при том же левом повороте машина совершенно парадоксальным образом заваливалась… вправо! Разумеется, никакой практической пользы последний вариант не давал. Если, конечно, не считать состояния лёгкого изумления, в которое приходили зрители.
После того, как двигатель глушили, машина по-прежнему спокойно стояла на своих двоих, не обнаруживая ни малейшего желания завалиться на бок.
Слева направо: кузовной дизайнер Алекс Тремулис и Томас Саммерс.
Как утверждали конструкторы, даже в случае непредвиденной остановки двигателя где-нибудь на светофоре, водитель имел не менее получаса на то, чтобы попытаться снова запустить двигатель или же спокойно дотолкать машину до ближайшей парковки и поставить её на вспомогательное шасси.
К сожалению, именно ротор, а точнее — проблема его раскрутки, стал не только главным достоинством, но и главным недостатком Gyro-X.
Даже при самых удачных условиях водителю требовалось не менее трёх минут, чтобы раскрутить его до рабочей скорости. Согласитесь, не самый лучший вариант в ситуации, когда нужно быстро «рвать когти» с места бандитской разборки в каком-нибудь Гарлеме.
В 1962 году американский энтузиаст Луис Суинни на площадях компании Gyro Transport Systems построил гирокар Gyro-X. Дизайн разработал сотрудник Ford Алекс Тримулоус (легенда авангарда в автодизайне), а гироскоп – инженер Томас Саммерс. Лёгкая, очень скоростная машина, почти мотоцикл, не произвела впечатление на потенциальных инвесторов. Судьба её неизвестна – скорее всего, её уничтожили в том же году. Сохранилось лишь несколько фотографий и полная техническая документация, доказывающая то, что эта машина была способна на движение.

История умалчивает о дальнейшей судьбе Gyro-X, но, судя по всему, машина так и не пошла дальше демонстрационных образцов. То ли бензин тогда был слишком дёшев, то ли американцы не смогли просто так отказаться от своей любви к шестиметровым дредноутам из Детройта.
А может быть маркетологи Gyro Transport Systems проиграли рекламную войну своим конкурентам, обслуживавшим интересы производителей четырёхколесных машин.
Так или иначе, но всё, что оставила нам история — эти чёрно-белые фотографии сомнительного качества и немногочисленных фанатов гиротранспорта, всё ещё пытающихся реанимировать идею двухколёсного городского авто.

А вот современные творения. Авторы нового транспортного средства называют его первым в мире гиростабилизированным катящимся смартфоном (Rolling Smartphone), так как этот умный аппарат сможет выходить в Интернет. Такое умение по нынешним временам — банальность. Но вовсе не электроника привлекает внимание в новинке.
Американская компания Lit Motors разработала двухместный электрический мотоцикл с закрытым кузовом C-1. Правда пока он существует лишь в виде полноразмерного макета.
Изюминка конструкции – пара маховиков, установленных под полом аппарата. Теоретически, они придадут машине хорошую устойчивость за счёт гироскопического эффекта. Даже на месте этот электробайк сможет подолгу стоять вертикально, так что во время посадки и высадки аппарату не понадобится подпорка.

C-1 являет собой воплощение столетней идеи на новый лад. Напомним, шествие стабилизированных маховиками двухколёсных автомобилей началось с гирокара Шиловского.
Неизвестно, впрочем, знал ли о своём давнем предшественнике основатель и глава Lit Motors Дэниел Ким (Daniel Kim). Но команда Кима постаралась учесть ошибки целого ряда похожих проектов прошлого, ни один из которых не совершил революции в транспорте, несмотря на все авансы, раздаваемые странным машинам самими изобретателями.
Прежние двухколёсные аппараты с маховиками, обеспечивающими вертикальное положение конструкции, по отзывам специалистов, неважно вели себя в скоростных поворотах. Ким и его коллеги постарались решить эту проблему. В C-1 маховики закреплены в подвижном подвесе, а управляться вся эта хитрая система должна электроникой.
В движение гироцикл от Lit Motors будут приводить два электромотора в ступицах колёс. Их общая мощность составит 40 киловатт. Максимальная скорость C-1 должна превысить 190 км/ч.
Что касается основного хранилища энергии на борту, то это будут химические аккумуляторы, видимо, литиевые. Причём Lit Motors планирует создать две версии аппарата.
Для развивающихся стран и не самых состоятельных покупателей американцы намерены предложить модель чуть-чуть подешевле, с аккумулятором на 4-6 киловатт-часов. А топ-версия немного подороже должна щеголять батареей на 8-10 кВт-ч.
В последнем случае запас хода мотоцикла составит 240-355 километров. Этого более чем достаточно для ежедневных разъёздов по городу.
Из современных примеров скрещивания мотоцикла с автомобилем стоит вспомнить швейцарский Zerotracer, в минувшем году успешно прошедший кругосветку, и его собратаE-Tracer. Но в тех машинах проблема поддержания вертикального положения во время остановки решалась куда проще – за счёт пары выдвигающихся боковых колёс.
По информации Gizmag, первая пробная партия C-1 должна была выйти на рынок в конце 2013 года по цене около $24 тысяч, а в конце 2014-го Lit Motors планирует начать серийный выпуск электробайка. Тогда стоимость этой машины упадёт до $16 тысяч. Как сейчас реально обстоят дела с этим транспортным средством я не знаю.
[источники]
источники
http://andriuha077.narod.ru/cad/gyrocar.html
http://nostradamvs.livejournal.com/309457.html?thread=5337809
http://www.membrana.ru/particle/17374
http://alternathistory.org.ua/girokar-petra-petrovicha-shilovskogo
Вот что я вам еще могу напомнить про достаточно интересные транспортные средства: вот посмотрите на Самый быстрый грузовик в мире, а вот пожалуйста Самый низкий автомобиль в мире и Самый длинный автомобиль в мире. Давайте вспомним еще про Электромобили СССР и что это за Антарктический вездеход Snow Cruiser Оригинал статьи находится на сайте ИнфоГлаз.рф Ссылка на статью, с которой сделана эта копия - http://infoglaz.ru/?p=63969
masterok.livejournal.com
Гирокар - в серию?: Гибрид
Калифорнийская компания Lit Motors обещает уже в 2014 году запустить в серийное производство настоящий гирокар. Модель C-1 продемонстрировали в виде полноразмерного макета и приоткрыли завесу тайны над некоторыми техническими подробностями. Имеет ли идея гирокара прикладное значение?

Внутри С-1 По макету сложно судить, насколько комфортно себя чувствует пассажир

Технические параметры С-1 позволяют классифицировать его как мотоцикл

Ford Gyron 1961 года — не гирокар, а полноразмерный демомакет. Стабилизатора в нем не было
Генеральный директор Lit Motors Дэниел Ким всегда любил транспорт. «Техника развивается по Дарвину, — говорит он. — Действует такой же естественный отбор, как и в живой природе. Сильный ест слабого, одни разновидности выживают, другие исчезают». Он объездил полмира, изучая транспортные средства, передвигаясь на «Синкансенах» и велорикшах, — чтобы понять, чего в технической «экосреде» не хватает. В 2003 году Ким вернулся в Штаты и основал Lit Motors, задавшись целью построить идеальный Sport Utility Vehicle. Сложно сказать, как у него получаются SUV’ы, но в 2011 году Ким продемонстрировал миру C-1, названный «первым гироскопически стабилизируемым смартфоном на колесах». Правда, слово «первый» — это преувеличение.
Что такое гирокар
Некогда мы писали об однорельсовых гировагонах Луи Бреннана («ПМ» №6'2009), где подробно осветили принцип работы гиростабилизатора, в том числе и установленного на легендарном гиромобиле графа Петра Петровича Шиловского, построенном на заводе Wolseley в 1914 году. Чтобы не заставлять читателя поднимать архивы, кратко повторим основные принципы.
Гироскоп — это устройство, работающее по принципу юлы (точнее, наоборот, юла работает по принципу гироскопа). Когда маховик гироскопа вращается в некой плоскости, а мы пытаемся сдвинуть его в плоскости, перпендикулярной указанной, гироскоп будет «сопротивляться» усилию, восстанавливая исходное положение оси вращения. Гироскоп, установленный на гирокаре Шиловского, использовал для стабилизации 600-килограммовый маховик диаметром около метра. Были проведены опыты: несколько взрослых мужчин так и не смогли опрокинуть гирокар — его устойчивость была значительно лучше устойчивости обыкновенных четырехколесных машин. Но с выключенным двигателем гирокар заваливался набок (для стоянки выдвигались боковые колесики) — и это было серьезным техническим недостатком.
Колесо истории
Про гирокар Шиловского мы писали достаточно подробно. Но между ним и конструкцией Кима имел место некий эволюционный ряд. Гирокар Шиловского закончил свое существование печальным образом. По бюрократическому недосмотру в 1948 году он был признан не имеющим ценности экспонатом, изъят из музея Wolseley и разрезан на металл. Но еще до того, в 1929 году, был построен второй гирокар — на этот раз пионером гироскопической техники Луи Бреннаном. Если над одноколейными железными дорогами австралиец работал серьезно, то гирокар стал его поздней игрушкой. На тот момент Бреннану было уже 77 лет. Пожилой инженер хотел заручиться финансовой поддержкой армии, но в итоге был вынужден искать спонсоров на «гражданке», так как ни австралийские, ни английские, ни американские военные оригинальной идеей не заинтересовались и преимуществ в ней не увидели.
Под передними сиденьями гирокара Бреннана располагались два гироскопа, вращающихся навстречу друг другу; они раскручивались до 3500 об/мин от 24-вольтовых электромоторов. Бреннан исправил некоторые недочеты Шиловского: водитель мог отключить двигатель и уйти — поддерживающие ролики выдвигались автоматически, и лишь потом двигатель самостоятельно прекращал работу. После разочарования в армейских ведомствах Бреннан демонстрировал гирокар руководителям компаний «Остин», «Моррис», «Ровер», но никто не хотел вкладывать средства в малопонятную технологию, не имеющую явственных преимуществ. В 1932 году Бреннан погиб под колесами автомобиля (не гирокара — вполне обычного), а его машина была разобрана.
Существовал и еще один действующий гирокар — Gyro-X, появившийся «в металле» в 1967 году. Над ним работала очень сильная команда: разработал гироскоп признанный авторитет в этой области Томас Саммерс, а кузов нарисовал великий и ужасный Алекс Тримулис, икона американского автодизайна. Создатели планировали целое семейство гирокаров — от семейных автомобилей до военных тягачей, а продемонстрировать систему решили на примере спорткара. Их работа была продолжением разработанного пятью годами ранее проекта гировагона изобретателей Гарри Феррейры, Эрнеста и Луиса Суинни.
Gyro-X был маленьким и прекрасно управляемым. Его аэродинамические качества были намного лучше, чем у спортивных автомобилей и мотоциклов того времени, а на крутых поворотах овальных треков он, не теряя скорости, поддерживал вертикальное положение. В отличие от предшественников, Gyro-X имел очень легкий маховик, всего 12 кг, но это компенсировалось скоростью его вращения (6000 об/мин). Инерции хватало на то, чтобы поддерживать машину в вертикальном положении в течение чуть ли не получаса после остановки двигателя. Минусом была сложность пуска Gyro-X: для раскрутки гироскопа требовалось около трех минут. В любом случае рекламную войну Саммерс и Тримулис проиграли. Демонстрации ни к чему не привели, и замечательная машина канула в Лету.
Больше работавших дорожных гирокаров в классическом понимании термина не существовало. Правда, в разное время появлялись конструкции-«имитаторы» и близкие по духу системы. Например, на многих снимках запечатлен Ford Gyron 1961 года — но это лишь полноразмерный макет, шоу-кар без двигателя и гироскопа. Стоит еще добавить, что специалисты американского института National Robotics Engineering Center разработали и продемонстрировали гироробот-моноцикл Gyrover — в виде большого колеса. Теоретически его можно использовать, например, для движения по лунной поверхности. В разное время было запатентовано, а порой и изготовлено в виде макетов около двух десятков различных гирокаров, но «в металле» они воплощения не получили.
Lit Motors
Преимущества гироскопической системы в какой-то мере «взаимокомпенсируются» ее недостатками. На железной дороге одним из важнейших плюсов является уменьшение собственной стоимости путей — примерно в два раза. Кроме того, гиропоезд предъявляет значительно меньшие требования к качеству дороги. Но для гирокаров строить специальные пути не нужно, и сэкономить на строительстве не получится. Соответственно, все свои преимущества гирокар должен продемонстрировать независимо от дороги, так сказать, самостоятельно.
Дэниел Ким пришел к выводу, что «дарвиновский отбор» несправедливо обошелся с гироскопическим транспортом, и что недостатки гирокаров не мешают сделать еще одну попытку. Соответственно, важнейшим фактором при разработке модели C-1 было максимальное использование преимуществ гироскопа.
В первую очередь, два колеса в линию позволяют сделать гирокар сколь угодно узким — как мотоцикл. Из трех предшественников Кима этим воспользовался только Алекс Тримулис при создании Gyro-X. Ким же пошел еще дальше и спроектировал машину, ничем, кроме гироскопа, не отличающуюся от мотоцикла. Его Lit C-1 узкий, он может спокойно преодолевать пробки, проезжая между полос. При этом он сильно выигрывает у мотоцикла в устойчивости и, соответственно, может преодолевать повороты на значительно большей скорости почти без наклона кузова. Кстати, именно на прохождение поворотов Ким обратил особенное внимание. Чтобы избежать ошибок предшественников, он обеспечил маховикам дополнительную степень свободы, разместив их на подвижной подвесной раме, контролируемой электроникой.
Маховиков в C-1 два, они небольшие и имеют высокую скорость вращения (привет Тому Саммерсу). Правда, точные цифры Lit Motors пока держит в секрете, что наводит на определенные сомнения. Оглашается только развиваемый суммарный крутящий момент — 1950 кг/м.
К слову, в какой-то мере Ким использовал в C-1 принцип легендарных швейцарских гиробусов — автобусов, движущихся за счет энергии вращающегося маховика. Конечно, в движение С-1 приводится электродвигателем (точнее, двумя мотор-колесами общей мощностью 40 кВт), но его маховики все-таки выполняют задачу накопления энергии, излишки которой отдают через посредство генератора в бортовую сеть машины.
С-1 задуман исключительно как городской автомобиль (или, скорее, мотоцикл). Гирокар рассчитан на одного человека, компактен, способен «продираться» через плотный трафик, удобен в управлении и, что особенно важно, не причиняет вреда окружающей среде. Позади водительского сидения предусмотрено дополнительное (довольно узкое) пространство, где можно положить какой-то багаж или посадить товарища. Впрочем, представленный разработчиками скетч наводит на мысль, что пассажиру будет не слишком-то удобно, хотя мотоцикл и позиционируется как двухместный.
По расчетам, одного заряда литиевых аккумуляторов должно хватать примерно на 300 км пробега (точнее, от 240 до 350), что для городских условий более чем достаточно; зарядка занимает от 4 до 6 часов. Максимальная заявленная скорость концепт-кара — 190 км/ч, разгон от 0 до 100 км/ч — за 6 секунд. Безопасность водителя гарантируется не только «непереворачиваемостью» C-1, но также обязательными ремнями и системой подушек безопасности. Что касается электронных «примочек», то создатели заявляют о возможности заводить C-1 со смартфона (да и вообще гирокар будет, выражаясь рекламными словами самого Дэниела, fully integrated with your phone!). Климат-контроль и аудиосистема в комплекте; также в С-1 будут наличествовать элементы «умного» автомобиля: анализ информации о погоде, пробках и т. д., выводы о наилучшем маршруте и скорости движения. Но, впрочем, почти все современные автомобили такое умеют.
У Lit Motors большие планы и надежды. На данный момент имеется полноразмерный макет гирокара, уже засветившийся в рекламном ролике, и система стабилизации, испытанная на стенде и на модели в половину величины байка. Параллельно разрабатывается еще одна модель мини-байка — Cargo Scooter, удобный мотороллер, например, для курьера или развозчика пиццы. Будут ли на нем устанавливаться гироскопы, еще не решено.
Интересно то, что С-1 уже можно предзаказать на официальном сайте Lit Motors, оставив аванс $250. Для вождения гирокара понадобятся мотоциклетные права; на выбор предоставляется несколько видов аккумуляторов.
В общем, в разработку Lit Motors хочется верить. Пожалуй, это наиболее удобный с виду городской мотоконцепт из всех, появлявшихся в последние годы. И самый стабильный и безопасный. Создатели утверждают, что с началом серийного производства стоить он будет не более $16 000, но мы-то знаем, что предварительные заявления частенько расходятся с делом (особенно когда вопрос касается поставок в Россию). Тем не менее в представленном виде гирокар наконец-то может стать реальностью. Шиловский, Бреннан и Тримулис могут спать спокойно.
Статья опубликована в журнале «Популярная механика» (№4, Апрель 2012).www.popmech.ru
Как работает гироскоп и что общего у йо-йо и самолета — T&P
Если волчок раскрутить, то он не упадет, пока не остановится. Это происходит благодаря закону сохранения момента импульса. Не очень-то понятное объяснение.
Когда пытаешься повернуть крутящееся тело, возникает сила, которая действует перпендикулярно силе, которую прикладываешь к нему. На втором рисунке видно, что, когда части колеса, обозначенные точками A и B, поворачиваются на 90 градусов, они стремятся повернуть колесо в плоскости экрана по часовой стрелке. Это называется прецессия. Из-за этой силы ось волчка всегда ходит по кругу, если запустить его не ровно, very non-intuitive.
Помечтаем о лете, представим себе, что мы едем на велике. Переднее колесо нам хорошо видно, почти сверху. Если мы пытаемся повернуть, например, налево, то мы прилагаем усилие к оси колеса. Тем частям колеса, которые в данный момент впереди, передается импульс, направленный влево, а задним частям колеса идет импульс вправо.
Но, поскольку мы быстро едем, и колесо крутится, то та часть, которая только что была впереди, оказывается сзади, и небольшой импульс, который мы успели придать этой части колеса работает уже в противоположном направлении, и поворачивает его в обратную сторону.
Получается, что из-за вращения колеса мы сами себе мешаем повернуть его. То есть, то усилие, которое мы прилагаем, чтобы повернуть колесо, нам же возвращается через пол-оборота колеса.
Любой вращающийся предмет можно назвать гироскопом. Он противодействует отклонению оси вращения, а люди этим активно пользуются:
В контроллерах современных игровых консолей и в iPhone 4 есть гироскопы, но они устроены по совсем другому принципу.
— В приборах навигации в самолетах и космических аппаратах. Хорошо сбалансированный гироскоп на специальных шарнирах, установленный на самолет, всегда сохраняет свое положение в пространстве, никакие фигуры высшего пилотажа не собьют его. Это позволяет приборам самолета всегда знать, где низ.
— В оружии. Пуля при стрельбе закручивается, что придает ей гораздо большую устойчивость, это сильно повышает точность стрельбы.
— Колеса велосипеда или мотоцикла работают как гироскопы, и это не дает ездоку упасть. На велосипеде сложнее ехать медленно, чем быстро, потому что на большой скорости колеса крутятся быстрее и делают его устойчивее.
— Есть много игрушек, где главная деталь — гироскоп: всевозможные волчки и йо-йо, с которыми можно делать вот такие трюки:
theoryandpractice.ru
Роторный гироскоп своими руками | all-he
Роторный гироскоп — быстро вращающееся твёрдое тело, ось вращения которого способна изменять ориентацию в пространстве. При этом скорость вращения гироскопа значительно превышает скорость поворота оси его вращения.Данный гироскоп способен сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на неё моментов внешних сил.
Непонятно? Смотрим видео — как работает гироскоп.
Как сделать гироскоп
Делать его будем из подручных средств.
Понадобится:
- обрезок ламината;
- 2 крышки/дна консервной банки;
- стальной стержень;
- гайки;
- 2 шурупа;
- кернер;
- медная проволока;
- клей «Поксипол»;
- изолента.
Вырезаем из ламината основную рамку. Медную проволоку сгибаем в виде кольца, а в шурупах с помощью керна делаем углубления.
Обрезаем стальной стержень нужной длины и затачиваем концы. Так же нужно сделать канавку для нити.
Ротор
В двух крышках от консервных банок проделываем отверстия по центру. На одну из крышек намазываем пластилин и на него прикрепляем гайки. Закрываем второй крышкой и вставляем стержень. Смазываем с двух сторон «Поксиполом» и пока клей не застыл необходимо центрировать диск, вставив его в дрель. Баланс должен получиться идеальным.
Собираем гироскоп. Ротор должен шевелиться между шурупами совсем чуть-чуть.
Устанавливаем кольцо из проволоки. Готово.
По материалам сайта: sam0delka.ru
Loading...Смотрите также
all-he.ru
Самодельный гироскоп
 Сегодня мы расскажем, как своими руками сделать антигравитационный диск.
Сегодня мы расскажем, как своими руками сделать антигравитационный диск.
В этом видео делаем простой антигравитационный диск. Для этого нам понадобится: диск от старого «винчестера», CD-диск, бокс под батарейку, выключатель, листок бумаги и моторчик от старого CD-рома.
Для начала нам необходимо собрать электронную начинку нашего гироскопа, для этого соединяем бокс под батарейку, выключатель и моторчик так, как показано на картинках
 Далее берем диск от накопителя на жестких магнитных дисках, вырезаем фрагмент бумаги и при помощи горячего клея приклеиваем бумагу к диску
Далее берем диск от накопителя на жестких магнитных дисках, вырезаем фрагмент бумаги и при помощи горячего клея приклеиваем бумагу к диску После этого приклеиваем шкив от моторчика по центру фрагмента бумаги. Чем точнее вы определите центр, тем меньше будет торцевое биение.
После этого приклеиваем шкив от моторчика по центру фрагмента бумаги. Чем точнее вы определите центр, тем меньше будет торцевое биение. Ждем когда горячий клей застынет и для эстетичности нашей конструкции обрезаем лист бумаги по внутреннему диаметру посадочного отверстия диска.
Ждем когда горячий клей застынет и для эстетичности нашей конструкции обрезаем лист бумаги по внутреннему диаметру посадочного отверстия диска. После этого приклеиваем электронную часть к оптическому диску.
После этого приклеиваем электронную часть к оптическому диску. После чего насаживаем шкив на вал моторчика и всё, наш гироскоп готов.Сам процесс сборки и работу антигравитационного диска вы можете посмотреть в видео.
После чего насаживаем шкив на вал моторчика и всё, наш гироскоп готов.Сам процесс сборки и работу антигравитационного диска вы можете посмотреть в видео.
Автор статьи “Самодельный гироскоп” Jeka57
Смотрите так же:
samodelka.info
Электрооборудование мотоцикла | Байкадемия
Традиционно начнем с требований, которые необходимо учитывать при разработке бортовых систем гоночных мотоциклов. Но в этот раз не будем проводить границу между классами гоночных машин, потому что электронные системы этих аппаратов имеют много общего.
 Системы управления двигателем 2D применяются как в чемпионате Супербайк, так и в MotoGP
Системы управления двигателем 2D применяются как в чемпионате Супербайк, так и в MotoGPПервое требование очевидное – бортовая электроника должна эффективно управлять сложнейшим агрегатом мотоцикла – двигателем, и позволять пилоту максимально использовать его возможности в любых условиях.Второе требование связано с тем, что персоналу конюшен необходимо знать, к какому результату привели те или иные регулировки мотоцикла и действия пилота. Для этого необходимо иметь возможность измерять и запоминать огромное количество параметров, таких, как скорость, ускорение, угол наклона, положение ручки газа и т.п.Требование номер три – некоторые из измеренных параметров необходимо в максимально удобной форме индицировать пилоту.Ряд условий в равной степени относится ко всем бортовым электронным системам мотоциклов: влагопылезащищенность, минимальный вес, виброустойчивость, температурная стабильность, малое потребление электроэнергии. Надеюсь, с этим все понятно.
 Так выглядит карта впрыска Power Commander’а
Так выглядит карта впрыска Power Commander’аПервым делом давайте разберемся, как работает система управления впрыском топлива.*(1) Одна из деталей системы впрыска – инжектор. По сути, это форсунка (или несколько форсунок), перед которыми стоит электрический бензоклапан. Количество бензина, протекающего через инжектор, определяется давлением бензина, диаметром и количеством форсунок и продолжительностью открытия электромагнитного бензоклапана. Таким образом, для дозирования бензина, смешивающегося с воздухом во впускном тракте, необходимо изменять продолжительность фазы открытия электроклапана (все остальные параметры считаем постоянными). Каким же образом ECU определяет, на какое время открыть клапан? Ключ к этой задаче – карты впрыска топлива. Они представляют собой обычные таблицы, представленные в электронной форме и «зашитые» в память процессора ECU.
На супербайке GSX-R1000 Юкио Кагаямы установлена приборка MotecКаждый раз, когда близится фаза впуска, процессор считывает информацию с датчиков оборотов, положения ручки газа, давления воздуха, температуры двигателя и т.п. и начинает путь по картам впрыска топлива. Например, в данный момент времени наш двигатель работает на 12000 об/мин и мы открыли «газ» на 70%. Вооружившись этими цифрами, процессор ECU «лезет» в таблицу и «ищет» строку и столбец, соответствующие этим оборотам и положению ручки газа. На пересечении нужного столбца и строки лежит ячейка с искомыми цифрами – продолжительностью открытия электромагнитного клапана топливного инжектора. Пусть для примера это будет 500 микросекунд.*(3) Но на этом работа процессора не заканчивается. Процессор лезет в следующую карту и ищет ячейку, соответствующую найденному времени 500 микросекунд и температуре воздуха, например, 27 градусов. Содержимое найденной ячейки – поправка, которую следует добавить к полученному из первой таблицы времени. Но и это не все.
 Для защиты от влаги и вибраций электроника Power Commander залита резиноподобным компаундом
Для защиты от влаги и вибраций электроника Power Commander залита резиноподобным компаундомДалее процессор по очереди обходит карты, содержащие поправки, зависящие от давления воздуха, температуры охлаждающей жидкости, масла и даже текущего напряжения бортовой сети, и все это нужно успеть сделать менее чем за 0,005 секунды. В итоге получается примерно следующее: 500+15%-8%+3%-6%.*(3) Это и есть точное время, на которое нужно открыть клапан инжектора для получения оптимальной смеси в данном цилиндре. Описанный процесс повторяется для каждого цилиндра и рабочего цикла. Аналогично картам впрыска существуют и карты зажигания, по которым ECU определяет оптимальный угол опережения и предотвращает детонацию. Все перечисленные карты для любых погодных условий разрабатываются на заводе во время динамометрических испытаний двигателей.
 Power Commander – бесспорный лидер в сегменте дорожных систем управления впрыском топлива
Power Commander – бесспорный лидер в сегменте дорожных систем управления впрыском топливаИз сказанного становится понятно, каким образом настраивают четырехтактные двигатели MotoGP и SBK, и почему мы так часто видим механиков с портативными компьютерами. Совершенно верно, карты загружаются с этих самых ноутбуков. Представляете, насколько проще загрузить новые карты с помощью компьютера, чем менять жиклеры и иглы карбов «двухтактников» GP-125 и GP-250? Если же к этому добавить тот факт, что с помощью этих самых карт ECU может автоматически компенсировать практически любые изменения метеоусловий, то преимущество впрыска топлива над традиционными карбюраторами становится абсолютным. Более того, почти все мотоциклы MotoGP и некоторые байки SBK позволяют загрузить в свои ECU сразу несколько наборов карт впрыска и опережения (например, один набор карт оптимизирован под свойства свежей резины, другой – под «мокрую» и третий – для «уставшей») и переключаться между ними прямо во время гонки.
 На гоночных мотоциклах вместо замка зажигания – обычный тумблер
На гоночных мотоциклах вместо замка зажигания – обычный тумблерКроме удобства настройки карты впрыска отвечают еще за один немаловажный аспект работы двигателя. Да, это пресловутая форма кривых мощности и крутящего момента. Изменяя параметры карты впрыска на определенных оборотах можно пожертвовать оптимальными пропорциями смеси в пользу формы этих самых кривых и устранить нежелательные «провалы» и «подхваты», облегчив, таким образом, дозирование мощности в поворотах. Или наоборот, пожертвовать покладистым характером мотора в пользу высокой пиковой мощности, которая позволит обогнать соперника на прямой. Напомню, что переключать карты можно непосредственно на ходу, что дает возможность использовать каждую карту именно тогда, когда она принесет больше пользы.Чтобы окончательно «подружиться» с понятием карт впрыска топлива, давайте вспомним о знакомом практически каждому спортбайкеру Пауэркоммандере.*(4) Это электронное устройство представляет собой дополнение к стоковому ECU и позволяет менять карты впрыска (а в комплекте с модулем зажигания*(5) – карты опережения и обороты срабатывания ограничителя) в зависимости от типа и конструкции впускной и выпускной системы. Конечно, по сравнению с профессиональными гоночными ECU фирм Motec и Magneti Marelli PowerCommander значительно отстает по функциональности, но для дорожного применения и даже для гонок BSB и AMA*(6) его возможностей более чем достаточно.
 Одна из команд, использующих систему фирмы 2D – Kawasaki
Одна из команд, использующих систему фирмы 2D – KawasakiРазобравшись с картами опережения и впрыска, давайте посмотрим, каким образом главный орган управления мотоцикла – ручка газа – руководит блоком ECU. Традиционная схема такова: ручка газа механически связана с заслонками во впускном тракте. На оси заслонок расположен электронный датчик, сообщающий ECU угол, на который эти заслонки открыты. В таком решении (оно применено практически на всех серийных спортбайках и мотоциклах класса SBK) есть одно неоспоримое преимущество: оно дает пилоту ощущение прямой связи ручки газа с задним колесом. Но в этом же кроется и его недостаток: пилот имеет возможность злоупотреблять этой прямой связью и требовать от двигателя того, чего он дать не может, или что в данных условиях приведет к негативным последствиям. В качестве примера давайте вспомним, как реагировали на открытие газа ранние дорожные спортбайки с впрыском топлива.
 В классе “125” не столь навороченные приборки по сравнению с MotoGP
В классе “125” не столь навороченные приборки по сравнению с MotoGPПри резком открытии заслонки скорость воздушного потока во впускном тракте также резко падает. Даже если ECU учтет это явление и уменьшит продолжительность фазы впрыска, струя топлива из инжектора может «прошить» насквозь медленный поток воздуха и осесть на противоположной стенке впускного патрубка. Как следствие, смесь получится обедненная и двигатель на мгновение потеряет мощность – захлебнется. Долей секунды позже осевшее топливо испарится и переобогатит следующую порцию смеси – двигатель рванет. Результат – «нервная» реакция на ручку газа. Успокоить «нервы» можно двумя способами. Первый – установить перед заслонкой, связанной с ручкой газа вторую, которой бы управлял сам ECU. В этом случае блок ECU сможет предотвратить падение скорости воздушного потока при резком повороте ручки газа путем плавного открытия (или даже закрытия) «своей» заслонки. По этому пути пошла Suzuki в своей системе SDTV.*(7) Второй способ – и вовсе отобрать у пилота прямой контроль над заслонками. Именно этот принцип и используется в самой передовой системе управления двигателем – Fly-By-Wire.*(8)
Система управления по проводам fly-by-wire пришла на мотоциклы из авиацииКак мы уже поняли, в системе Fly-By-Wire ручка газа более не связана напрямую с заслонками во впускном тракте, а управляет датчиком, преобразующим угол поворота в электрические сигналы. Эти сигналы приходят на вход модуля ECU, который, если необходимо, корректирует их, вносит соответствующие поправки и открывает (если открывает!) заслонки с помощью шагового электродвигателя именно на ту величину, на которую нужно в данный момент времени. Другими словами, если пилот требует от двигателя невозможного, блок ECU внесет свою поправку и сгладит человеческую ошибку. Кроме того, что описанное выше «нервное» поведение мотоцикла при резком открытии газа становится подконтрольным, электроника блока ECU позволяет поднять уровень контроля над мотоциклом на принципиально новые высоты. Только система Fly-By-Wire позволяет в чистом виде внедрить такие «сервисы», как контроль старта *(9), контроль сцепления с дорогой *(10) и управление торможением двигателем *(11). Справедливости ради стоит отметить, что все эти «сервисы» можно реализовать и на классических системах впрыска с механической связью между ручкой газа и заслонками, но заставить их работать гладко гораздо сложнее.
Датчик перемещения подвески позволяет точнее выбрать ее настройкиИтак, контроль старта. Для эффективного ускорения необходимо поддерживать обороты в зоне максимального крутящего момента и одновременно с помощью сцепления удерживать ускорение в таком диапазоне, чтобы оно было максимально возможным, но не привело к чрезмерному поднятию переднего колеса. Задача не из простых, особенно если между ногами табун в 250 голов. К счастью, электроника на нашей стороне. Перед началом гонки пилот нажатием кнопки переводит мотоцикл в режим старта. Имея полный контроль над заслонками, ECU системы Fly-By-Wire независимо от положения ручки газа (пилот может выкрутить ее на полную) ограничивает мощность двигателя такой величиной, которая может быть безопасно реализована при данных условиях. Ориентируясь по многочисленным бортовым датчикам (о них – чуть позже), ECU на ранних стадиях определяет начало подъема переднего колеса или пробуксовку заднего, и в нужных пределах снижает или увеличивает мощность. Кроме этого блок ECU в состоянии управлять и сцеплением (достоверных данных нет, но есть подозрение, что некоторые команды используют блоки сцепления, управляемые электроникой), регулируя связь между двигателем и колесом. Так что гонщику для эффективного старта остается открутить газ и в нужный момент бросить сцепление. А первый же сброс газа выведет ECU из стартового режима и возвратит пилоту полный контроль над мотоциклом.
Этот датчик срабатывает от перемещенияВторой «наворот» систем Fly-By-Wire – контроль сцепления с дорогой. По сравнению со сложностью этого «наворота» предыдущий – просто детский лепет. Причем трудность не в том, чтобы остановить пробуксовку, а в том, чтобы определить, когда она началась, и когда эта пробуксовка вредна. Например, можно сравнивать скорости вращения переднего и заднего колес, но во время вилли эти данные не позволят блоку ECU принять правильное решение. Еще сложность: как быть с контролируемым заносом, вызванным намеренно? В этом случае нам вообще не нужно останавливать пробуксовку. Выход – «научить» ECU принимать решение на основании данных, приходящих сразу от нескольких датчиков. Например, если датчик хода вилки сообщает, что она полностью разжата, значит, мотоцикл поднялся на заднее колесо, и замедление вращения переднего колеса относительно заднего не означает начало пробуксовки. Но как же тогда выявить начало сноса заднего колеса, если мотоцикл едет только на нем? Для этого используют такие датчики, как трехмерные гироскопы и акселерометры. Благодаря гироскопическому датчику ECU точно знает, в каком положении находится мотоцикл, а акселерометр сообщит момент резкого изменения бокового ускорения, характерный для начала сноса заднего колеса. Кроме этого данные гироскопа используются для масштабирования карт впрыска таким образом, чтобы при прохождении поворотов в распоряжении пилота было лишь немного больше мощности, чем можно реализовать при данной скорости и угле наклона мотоцикла. Другими словами, на основании данных гироскопа ECU автоматически уменьшает мощность двигателя в поворотах до величины, лишь немного превосходящей ту, которую может реализовать резина. Это дополнительно облегчает дозирование газа и уменьшает негативные последствия ошибок пилотов.
 Блок спутниковой навигации позволяет системе даталоджинга записывать все основные параметры движения мотоцикла
Блок спутниковой навигации позволяет системе даталоджинга записывать все основные параметры движения мотоциклаНо даже гироскопический датчик и акселерометр не позволяют достоверно определить, что происходит с мотоциклом в некоторых гоночных ситуациях. Чтобы ECU имел возможность действительно объективно оценивать происходящее, ему необходимо знать реальную скорость и направление движения мотоцикла относительно поверхности трека. Эту информацию предоставляют три типа датчиков: оптический датчик скорости, радар и датчик на базе GPS*(13). У первых двух есть существенные недостатки (оптический датчик неточен, когда мотоцикл находится в наклоненном положении, радар ловит помехи от инфраструктуры трека и других радаров, и оба они довольно громоздкие), а вот датчик на базе GPS показал себя весьма хорошо. От 10 до 50 раз в секунду он считывает сигналы нескольких спутников и вычисляет с их помощью реальную скорость мотоцикла в каждый момент времени и его положение на треке с точностью до нескольких сантиметров. Полученная информация и становится «пищей» для размышления блоку ECU, а также поступает в систему даталоджинга, которую мы «препарируем» чуть позже.
 Температура карбонового тормозного диска фиксируется системой даталоджинга 2D
Температура карбонового тормозного диска фиксируется системой даталоджинга 2DПоследний «наворот» системы Fly-By-Wire – контроль торможения двигателем. Из второй части «Дрессуры» мы знаем, что при «наглых» переключениях вниз с блокировкой заднего колеса борется проскальзывающее сцепление (его еще называют сцеплением с обратной пробуксовкой). Однако его способностей оказывается недостаточно. Дело в том, что в зависимости от различных внешних условий (качество поверхности трека, сухой асфальт или мокрый, направление уклона дороги и т.п.) в распоряжении задней покрышки оказывается разная величина сцепления с дорогой. Из-за того, что блок сцепления не способен отслеживать связь заднего колеса с дорогой и начинает проскальзывать только при определенной фиксированной величине обратного момента, он далеко не всегда эффективно предотвращает блокировку заднего колеса. Облегчить задачу проскальзывающего сцепления и призвана система управления торможением двигателем.
 Датчик давления в тормозной системе позволяет записать в память данные об энергичности торможения
Датчик давления в тормозной системе позволяет записать в память данные об энергичности торможенияСуществует несколько подходов к построению системы управления торможением двигателем. Первый заключается в том, что ECU анализирует сигналы бортовых датчиков и при появлении намеков на блокировку заднего колеса во время торможения двигателем плавно повышает холостые обороты до прекращения симптомов. Второй подход используется в Honda RC211V. ECU этого байка управляет специальным электромагнитным клапаном, врезанным во впускной тракт между клапанами ГРМ и заслонками. Как только заднее колесо проявляет тенденцию к блокировке, клапан открывается и позволяет воздуху напрямую течь в цилиндры, уменьшая эффект торможения двигателем. Теоретически возможен и третий подход, когда ECU напрямую (с помощью гидравлики) заставляет блок сцепления проскальзывать, но достоверной информации об его применении пока нет.
Приборная панель 2D имеет функции даталоджингаПрежде чем завершить разговор о системе Fly-By-Wire, хочется упомянуть о двух необычных мотоциклах, где эта система применена. Один из них участвует в MotoGP и совместил в себе преимущества классической системы впрыска (с механической связью между ручкой газа и заслонками) и «навороты» электроники. Это Yamaha M1. Система управления двигателем этого спортбайка уникальна тем, что ручка газа механически связана только с двумя заслонками из четырех. Другими словами, пилоту доверили напрямую командовать только половиной двигателя. Оставшейся парой заслонок и, соответственно, цилиндров, полностью управляет ECU. Такое решение позволило сохранить столь важное ощущение прямой связи ручки газа с задним колесом, и при этом не потерять ни одного преимущества Fly-By-Wire.
 Приборная панель мотоцикла Алекса Барроша – со стрелочным тахометром
Приборная панель мотоцикла Алекса Барроша – со стрелочным тахометромВторой необычный мотоцикл – новая Yamaha R6, которая вписала себя в историю как первый серийный спортбайк с системой Fly-By-Wire. Ее система YCCT *(13,5) – прямой потомок гоночного ECU Yamaha M1. Принципиальная разница электроники этих мотоциклов лишь в том, что на дорожном R6 установлен дублирующий ECU, который вступит в работу немедленно, если первый «мозг» вдруг откажет. Кроме этого система YCCT управляет всем двигателем целиком, а не половинкой, как М1. В остальном родство систем болида MotoGP и дорожной R6 сомнений не вызывает.
 Температуру шин во время гонки очень важно знать производителям гоночных покрышек
Температуру шин во время гонки очень важно знать производителям гоночных покрышекОтдельной статьей в бортовой электронике мотоциклов MotoGP и SBK идет электронный рулевой демпфер. Это одно из немногих устройств, которое протоптало таки тропинку от гоночной техники MotoGP до серийных дорожных спортбайков. По сути, это обыкновенный регулируемый рулевой демпфер. Отличие лишь в том, что управляет демпфированием электроника блока ECU. Мы знаем, что на высоких скоростях демпфирование должно быть сильнее, на низких – слабее. Именно это принцип и реализован в демпфере Honda CBR1000RR Fireblade, который позаимствовал технологию у RC211V. Но если электроника может управлять настройками рулевого демпфера, то с таким же успехом она может перенастраивать гидравлику вилки и моноамортизатора! Знаменитые фирмы Ohlins и WP уже выпустили амортизаторы, которые можно перенастраивать кнопками на маленьком электронном блоке. Так что до настоящей активной подвески всего один шаг – надо только «подружить» электронику подвески и ECU.
 Этот датчик квикшифтера реагирует на давление
Этот датчик квикшифтера реагирует на давлениеЕще одна электронная «приблуда», достойная упоминания в нашем исследовании – квикшифтер (или спидшифтер – оба термина верны *(13,6)). В двух словах – в разрез штока переключения передач ставится датчик давления или перемещения, который сообщает ECU о намерении пилота переключить передачу. Получив такой сигнал, ECU на долю секунды «рубит» зажигание и впрыск, КП на мгновение разгружается и позволяет переключить передачу вверх без выжима сцепления и сброса газа. Польза от такого устройства проявляется как на прямых (экономим на времени переключения), так и в поворотах (особенно затяжных), где обычное переключение «вверх» с выжимом сцепления «растревожит» подвеску.
 Motec M880 – одна из распространенных гоночных систем управления двигателем
Motec M880 – одна из распространенных гоночных систем управления двигателемИзучив сложнейшие системы управления стартом, контроля сцепления с дорогой и торможения двигателем, уже никого не удивишь тем фактом, что современные гоночные мотоциклы MotoGP и SBK буквально напичканы электронными датчиками. Но кроме «пищи для размышлений» блоку управления двигателем они поставляют «головную боль» еще и персоналу конюшен. Совершенно верно, речь пойдет о системе даталоджинга *(14). Она призвана считывать информацию с многочисленных бортовых датчиков с частотой до сотен раз в секунду и записывать ее в бортовую память (чаще всего – на обычную флэш-карту, знакомую нам по цифровым фотоаппаратам или MP-3 плеерам). Кроме этого, как мы отмечали ранее, часть этих данных индицируется на приборной панели гоночного мотоцикла.
Датчик перемещения подвески позволяет точнее выбрать ее настройкиКакие же датчики поставляют информацию системе даталоджинга? Список весьма длинный: датчики перемещения подвески, скорости вращения колес, датчик атмосферного давления, давления и температуры воздуха в корпусе воздушного фильтра, давления и температуры воздуха за бортом, давления и температуры масла, температуры выхлопных газов и содержания в них кислорода, температуры тормозных дисков, детонации, сенсор положения коленвала и распредвалов, ИК-сенсор таймера кругов, датчик давления в тормозных магистралях, сенсор угла поворота ручки газа, трехмерный акселерометр, трехмерный гироскоп, датчик температуры топлива, антенна приемника GPS, датчики температуры покрышек, датчик давления на педаль КП, уф, по-моему, не упустил ничего *(16). У опытных электронщиков возникнет логичный вопрос: как же быть с проводами? Ведь при таком количестве электроники проводка мотоцикла превратится в кошмар! Причем и с точки зрения сложности, и сточки зрения веса!
 Коммутатор позволяет увеличить максимальное количество подключенных датчиков
Коммутатор позволяет увеличить максимальное количество подключенных датчиковДействительно, это было бы так, если бы от каждого датчика к блоку ECU (большинство блоков ECU совмещают в себе и функции даталоджинга, хотя есть и исключения, например, тот же пауэркоммандер) шел персональный провод. Но к счастью, проектировщики бортовой электроники нашли выход и из этой ситуации: шина CAN *(15). Если не влезать по уши в электронные дебри, то описать работу шины CAN можно так. Все бортовые электронные устройства подключаются к модулю ECU не отдельными проводами к отдельным контактам, а общаются по одним и тем же проводам, которые последовательно обходят мотоцикл с носа до хвоста. Датчики, сенсоры, блок ECU, приборная панель и т.п. «слышат» переговоры между всеми устройствами на шине, и выбирают те данные, которые им «интересны». Экономия на длине «меди» – огромная, и порой выливается в килограммы. Кроме этого инженерам-электронщикам проще работать с бортовой электроникой, потому что не нужно искать провода от нужного датчика – провод на всех один.
Автор Антон Барсуков, фото автора и производителей.
*(1) В профессиональной англоязычной литературе эту систему называют Engine Control Unit – сокращенно ECU. Кроме этого используются такие термины, как Engine Management System (EMS) и Engine Processor.*(2) «Мото» №6 2006, стр. №*(3) Цифры взяты «от фонаря».*(4) Dynojet PowerCommander.*(5) Dynojet Ignition Module.*(6) Американская мотоциклетная ассоциация – организатор американской серии Superbike.*(7) Suzuki Dual Throttle Valve – система впрыска с двумя заслонками фирмы Suzuki. В прошлой части «Дрессуры» мы рассмотрели, как система SDTV позволяет оптимизировать волновые процессы во впускном тракте.*(8) В вольном переводе – «Полет по проводам».*(9) Launch Control.*(10) Traction Control.*(11) Idle Speed Control.*(12) «Мото» №4 2006, стр. 78*(13) Global Positioning System – система спутниковой навигации, позволяющая с огромной точностью определять координаты и скорость.*(13,5) Yamaha Chip-Controlled Throttle*(13,6) Quickshifter, speedshifter.*(14) Datalogging – система цифровой многоканальной записи физических величин. Типичный пример – «черный ящик» самолетов.*(15) Controller Area Network, в данном случае слово «шина» означает не «покрышка», а набор проводов – термин электронный.*(16) Использовать полный набор сенсоров экономически под силу далеко не всем командам, поэтому на некоторых мотоциклах часть датчиков не устанавливают.
Лямбда-сенсор позволяет системе управления двигателем контролировать состав смеси Приборная панель Foggy Petronas специально разрабатывалась под мотоцикл Оказывается, Showa выпускает датчики квикшифтеров
Историческая справка.
Ситема Fly-By-Wire пришла к нам из авиации. Еще в тридцатые годы перед конструкторами самолетов встала проблема, что пилотам становилось все труднее управлять увеличивающимися по площади управляющими поверхностями («рулями») самолетов. В 1949 году первая система Fly-By-Wire была установлена на гигантский авиалайнер Bristol Brabazon. 1969 год подарил миру Concord, на нем применили самую совершенную по тем временам систему Fly-By-Wire. В 1972 году на самолете F8, принадлежавшим NASA впервые испытана полностью цифровая система Fly-By-Wire. В 1988 году построен первый пассажирский аэробус с системой Fly-By-Wire – А320. 1992 год – дебют Fly-By-Wire в F1, а также использование Fly-By-Wire в самолетах-невидимках B2 и F-117, которые из-за плохой аэродинамики попросту не могли бы летать без помощи компьютеров. 2002 год – самый знаменательный для мотоциклистов: система Fly-By-Wire появилась на мотоциклах класса MotoGP (Aprilia). 2006 год вошел в историю как год появления первого дорожного спортбайка с системой Fly-By-Wire (Yamaha R6).
bikedemia.ru
Honda показала технологию Riding Assist, которая сохраняет равновесие у мотоцикла без гироскопов
Компания Honda нашла способ избавить байкеров от их "неулкюжести", представив концептуальный самобалансирующийся мотоцикл, который умеет сохранять равновесие даже когда стоит на месте! Эта технология, дебют которой состоялся сегодня на выставке CES 2017, получила название Riding Assist. Она доказывает, что можно обеспечить стабильность стоящему на месте мотоциклу даже без использования тяжелых и дорогих гироскопов! Honda стала первой компанией, которая смогла это реализовать "в металле".
При работе на Riding Assist, компания Honda Motor Company черпала вдохновение у двуногого робота Asimo, изучая то, как ему удается сохранять равновесие. Инженеры также опирались на свой опыт в работе над коцептом Uni-Cub, что в итоге позволило им создать рабочий прототип, который смог самостоятельно без чьей-либо помощи выехать на сцену во время презентации на CES 2017. Удивительно, не правда ли?
На скоростях менее 5 км/ч (4.8 км/ч, если быть совсем точным), система Riding Assist дистанционно разрывает связь между рулем и передней вилкой, после чего управление за передним колесом передается бортовому компьютеру. Мотоцикл постоянно (около 1000 раз в секунду) получает информацию от датчиков о угле наклона, после чего вносит коррективы с помощью угла поворота переднего колеса, сохраняя равновесие.
Honda Motor Company специально не стала использовать гироскопы в системе Riding Assist, чтобы не утяжелять мотоцикл и сохранить легкость при вождении. Новая система должна значительно облегчить медленную езду на мотоциклах (например, в пробках). Водителю теперь не надо постоянно перекладывать собственный вес, чтобы сохранять равновесие. Этим теперь может заведовать электроника. Пока это лишь прототип, но компания уверяет, что его достаточно просто превратить в серийную разработку, которая может стать мейнстримом в ближайшие несколько лет.
carakoom.com